ArduPilot开发中的网络技术与计算机软件开发综述
随着无人机和自动驾驶技术的快速发展,ArduPilot作为一款开源的自动驾驶系统,在无人机、无人车和无人船等领域得到广泛应用。其开发过程中,网络技术与计算机软件开发技术起着至关重要的作用。本文将从ArduPilot的基本架构出发,综述网络技术和计算机软件开发在ArduPilot开发中的应用与挑战。
一、ArduPilot开发概述
ArduPilot是一个基于C++和Python开发的开源自动驾驶平台,支持多种硬件平台,如Pixhawk、Navio2等。其核心功能包括飞行控制、导航、任务规划等。开发团队通过GitHub进行协作,采用敏捷开发方法,持续集成和自动化测试确保代码质量。
二、网络技术在ArduPilot开发中的应用
网络技术在ArduPilot中主要用于通信和数据传输。具体包括:
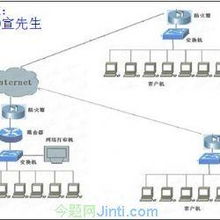
- MAVLink协议:MAVLink是一种轻量级的消息传输协议,用于飞行器与地面站之间的通信。它支持实时数据传输,如位置、速度和传感器数据,同时允许远程控制和任务上传。
- 无线通信模块:ArduPilot集成Wi-Fi、4G/5G和蓝牙等模块,实现与地面控制站或云平台的连接。例如,通过Wi-Fi实现低延迟的实时视频流传输,或通过4G网络进行远程监控。
- 网络仿真与测试:开发人员使用SITL(Software-in-the-Loop)仿真环境,结合网络模拟工具(如NS-3)测试通信协议在复杂网络条件下的性能,确保系统鲁棒性。
三、计算机软件开发在ArduPilot中的关键作用
计算机软件开发是ArduPilot核心功能实现的基础:
- 编程语言与框架:ArduPilot主要使用C++编写高性能的飞行控制算法,Python用于脚本和地面站开发。框架如AP_HAL(硬件抽象层)确保代码跨平台兼容性。
- 软件架构与模块化设计:系统采用模块化架构,将导航、传感器融合和通信等功能分离,便于维护和扩展。例如,EKF(扩展卡尔曼滤波)模块负责状态估计,而任务管理器处理飞行计划。
- 开发工具与流程:使用Git进行版本控制,配合持续集成工具(如Jenkins)自动化构建和测试。代码审查和单元测试确保软件可靠性,同时文档生成工具(如Doxygen)帮助开发者理解代码结构。
四、挑战与未来展望
尽管ArduPilot在开发中取得了显著进展,但仍面临挑战:网络延迟和安全问题可能影响实时控制;软件复杂性增加,需要更高效的调试和验证方法。未来,随着5G和边缘计算的发展,网络技术将进一步提升通信带宽和可靠性;同时,人工智能和机器学习技术的集成,将推动自动驾驶软件的智能化发展。
ArduPilot的开发依赖于网络技术和计算机软件开发的深度融合。通过持续优化通信协议和软件架构,ArduPilot有望在更多自动化场景中发挥关键作用,推动无人系统技术的创新。
如若转载,请注明出处:http://www.xinliancc.com/product/22.html
更新时间:2025-11-28 16:35:08